Aircraft can continue to fly if an engine fails however, for quadrotor drones – those with four propellers – such a failure poses a serious problem. With only three working rotors, drones lose stability and inevitably crash unless an emergency control system is used.
Researchers from the University of Zurich and the Delft University of Technology have developed a system to overcome that – if a rotor suddenly fails, built-in sensors can feed data to autonomous control systems to stabilize the drone and keep it flying.
“If a rotor fails, the drone begins to spin around like a ballerina,” says Davide Scaramuzza, head of the Robotics and Perception group at the University of Zurich (UZH) and the National Rescue Robotics Grand Challenge research unit of the Swiss National Science Foundation (SNSF), which finances the study. “The rapid rotation causes conventional controls to fail. Unless the drone has access to very precise position measurements.”
As soon as the drone starts to spin, it can no longer determine its position in space and crashes.
One possible solution is to give the drone a reference position using GPS. However, corresponding signals cannot be received in all environments. Rather than relying on a GPS measurement, the scientists use the visual information from multiple built-in cameras.
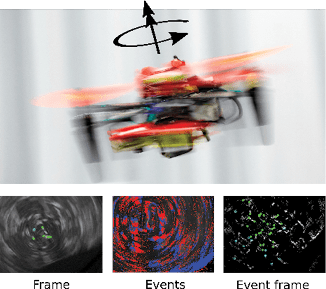
Researchers equipped quadrotors with standard cameras that recorded several images per second at a constant speed and event cameras with independent pixels only activated by a noticeable change in light. The team’s algorithms combine information from both sensors to track the quadrotor’s position. The on-board computer controls the drone while it flies with only three working rotors.
Tests showed that both types of cameras work well in normal lighting conditions.

“However, when the light decreases, standard cameras show motion blur, which ultimately causes the drone to crash. The event cameras, on the other hand, work well even in very little light,” says first author Sihao Sun and postdoc in Scaramuzza’s laboratory.
The scientists believe that their work can improve the flight safety of quadrotors in areas where the GPS signal is weak or absent.
The researchers have made their controller and algorithm open source.

Explore the January February 2021 Issue
Check out more from this issue and find your next story to read.
Latest from Aerospace Manufacturing and Design
- Piasecki acquires Kaman's KARGO UAV program
- PI Americas’ long-travel XY piezo nanopositioners-scanners
- AAMI project call submission deadline extended to May 12
- Jergens launches cast iron tooling column additions
- Airbus to acquire assets relating to its aircraft production from Spirit AeroSystems
- FANUC America's Cobot and Go web tool
- Chicago Innovation Days 2025: Shaping the future of manufacturing
- High-density DC/DC converters for mission-critical applications





